
Computer Graphics — Viewing
Viewing Transformations
我们知道,尽管我们认为游戏世界是三维的,但我们的屏幕目前只能是二维的,也就是我们需要将三维的世界显示在二维的屏幕上,这样的变换就叫做视图变换(Viewing Transformation)。这与之前所讲解的**变换矩阵(Transformation Matrix)**紧密相关。
具体来说可以分为以下几个步骤:
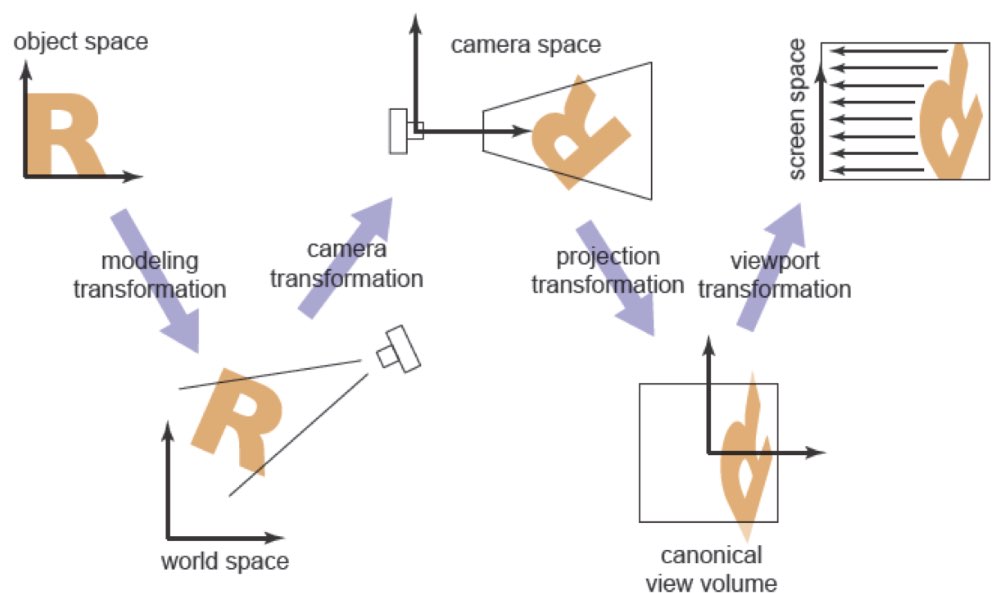
其中最核心的过程就是 Model Transformation、Camera/View Transformation、Projection Transformation,一般直接统称 MVP 变换。
Model Transformation 和 Camera/View Transformation 很容易理解,就是将物体局部坐标转换成世界坐标,然后将相机移动到原点,相机朝向根据需要可以选择 -z 或者 z 方向。在本系列中,都认为相机朝向为 \(-z\),\(+y\) 为正上方。
Viewport Transformation
我们先从后往前来理解。Viewport Transformation 做的事就是将坐标从 Normalized Device Coordinates (NDC) space 投影到 screen space,深度(z)我们暂时不用管,在透视投影和光栅化阶段会更详细说明,我们当前的目标是将坐标从 \([-1, 1]^3\) 投影到 \([-0.5, n_x-0.5] \times [-0.5, n_y-0.5]\),\(n_x, n_y\) 是屏幕的横竖像素数。由于 \(z\) 不用管,因此实际上只需要投影 \([-1, 1]^2\)。这样的区间投影实际上只需要两步变换,第一步是拉伸区间长度,第二步是平移区间,因此我们很容易可以得到 Viewport Transformation Matrix:
Orthographic Projection Transformation
我们知道相机一般有正交(Orthographic)和透视(Perspective)两种,我们暂时先讲解正交,因为透视会更加复杂,将在后面几节中说明。
这一步变换的目的就是,将视景体(View Volume)内看到的画面,投影到刚才的 NDC 空间中。正交的 View Volume 是一个长方体,具体来说,左前下角的点为 \((l, b, n)\),右后上角的点为 \((r, t, f)\)。
各裁剪面为与坐标轴对齐的平面(下式中 \(x=l\) 表示左裁剪面、\(x=r\) 表示右裁剪面,其余类推):
要从 \([l, r] \times [b, t] \times [f, n]\) 投影到 \([-1, 1]^3\),实际上上一节已经说明了,先拉伸再平移即可(需要注意的是中心点的坐标也会对应拉伸)。容易得到 Orthographic Projection Transformation Matrix:
Camera Transformation
我们知道,Camera Transformation 的作用是将坐标从世界空间转换到相机空间,但是我们只有相机坐标点和相机观测方向,是无法构成一组基向量的,因此无法张成相机空间,那应该怎么办呢?
为了解决这个问题,图形学引入了一个世界向上向量,通常情况下,我们强制规定:在世界空间中,天空的方向是正上方。因此,我们人为提供一个辅助的世界向上向量 \(\vec{t}\)(通常就是世界坐标系的 Y 轴:\(\begin{bmatrix} 0 & 1 & 0 \end{bmatrix}^T\))。这只是一个大概的参考标准,它不需要(通常也不会)与相机的观测方向严格垂直。它的唯一作用,就是告诉相机:“你的头顶尽量往这个方向靠拢,不要倒立,也不要侧翻”。
重新整理下,现在我们有:
- the eye position \(\mathbf{e}\),
- the gaze direction \(\mathbf{g}\),
- the view-up vector \(\mathbf{t}\).
我们要使用这些信息开始构建基向量。
首先是 \(z\) 轴,前面说过相机总是看向 -z 或者 z 方向,因此观测方向 \(\mathbf{g}\) 本身就是 \(z\) 轴方向,由于我们认为相机朝向 \(-z\),因此我们可以得到 \(z\) 轴基向量:
其次是 \(x\) 轴,我们有了 \(z\) 轴基向量 \(\mathbf{w}\) 和近似于 \(y\) 轴的向上向量 \(\mathbf{t}\),因此我们可以使用叉乘来构建 \(x\) 轴基向量:
同理,有了 \(z\) 轴基向量 \(\mathbf{w}\) 和 \(x\) 轴基向量 \(\mathbf{u}\),我们可以使用叉乘得出真正的 \(y\) 轴基向量 \(\mathbf{v}\):
于是我们得到了相机在世界空间中的变换矩阵,描述的是相机空间到世界空间的变换:
但是 Camera Transformation 的作用是将坐标从世界空间转换到相机空间,因此我们需要的实际上是 \(M_{camera}\) 的逆变换矩阵,也就是大名鼎鼎的 \(LookAt\) 矩阵。我们知道这番变换只涉及旋转与平移变换,对于旋转变换部分,由于是正交矩阵,因此逆矩阵为转置矩阵;而对于平移部分,只需平移负值即可。故:
那么到此为止,我们实际上已经跑通了一个视图变换流程了:
Projective Transformations
接下来我们步入更为复杂的透视变换。我们的思路是将透视空间转换成正交空间,这样我们可以直接使用前面推导出来的后续矩阵了。我们都知道透视遵循着近大远小的原则,也就是同一物体离观察点越近时所成的像越大。在已知物体位置、视平面和视点的情况下,我们可以给出这样的关系图:
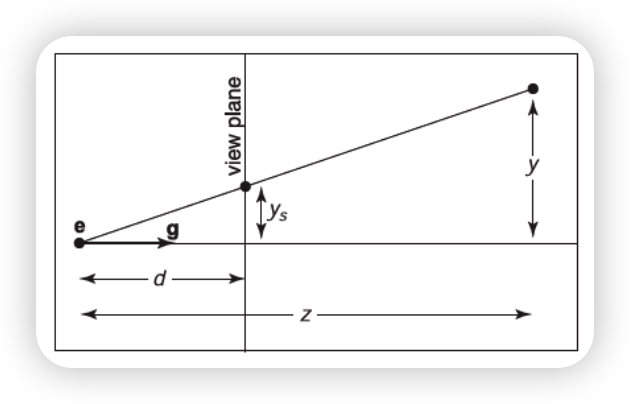
物体 \(y\) 与所成像 \(y_s\) 大小满足:
也就是说,在 \(y\) 与 \(d\) 不变时,\(y_s\) 与深度 \(|z|\) 成反比(等价地,透视缩放因子与 \(|z|\) 也成反比)。
但是这也就导致了新的问题,所有的坐标变换,必须且只能用矩阵乘法来完成,而这是线性变换,也就是说我们只能得到这样的形式:
这怎么办呢?还记得我们在讨论齐次坐标时提到过,我们将坐标 \(\begin{bmatrix} x & y & z \end{bmatrix}^T\) 升维成齐次坐标 \(\begin{bmatrix} x' & y' & z' & w \end{bmatrix}^T\) ,并且和 \(\begin{bmatrix} x'/w & y'/w & z'/w & 1 \end{bmatrix}^T\) 表示的是一个点,这一步其实在设计硬件时免费给我们送了一个除法!只是平时我们为了方便起见,都设 \(w = 1\)。
更广义地说,我们可以设 \(\tilde{w} = ex + fy + gz + h\),于是有:
这样的变换称之为:投影变换 / 单应性变换 (Projective Transformation / Homography)。而我们将要应用的令 \(w = -z\) 就是其特例。
Perspective Projection
我们再回到透视的问题,我们已知了 \(x, y\) 坐标的变换,但是 \(z\) 坐标如何变换呢?从图上看,似乎因为所有点都在 \(z=n\) 平面上,因此 \(z\) 坐标变换后直接变成 \(d\) 即可,但是这样变换的话,原来的深度所携带的信息就全部消失了,比如说我们希望近的物体能够遮挡远处的物体,但是这样变换后实际上已经无法判断远近了。因此我们需要对 \(z\) 轴有一定的变换,但是具体怎样变换我们暂且不得而知:
我们期望的是:
实际上我们可以据此反推出变换矩阵的部分:
由于 \(z\) 的变换肯定与 \(x, y\) 是无关的,因此实际上第三行还能精确为 \(\begin{bmatrix} 0 & 0 & A & B \end{bmatrix}\),也就是 \(z' = Az + B\),再进一步推导的话,我们需要利用两个几何约束:
- 近裁剪面(\(z=-n\))上的任何点,挤压后依然在原地。
- 远裁剪面(\(z=-f\))上的任何点,挤压后 Z 坐标不变。
联立可以解得:
我们因此也得到了 \(z\) 的变换关系:
可见深度 \(Z_{ndc}\) 和实际物理深度 \(z\) 是反比例关系(\(-1/z\)),这就导致了
当物体离相机很近时,\(Z_{ndc}\) 变化非常剧烈,深度精度极高。
当物体离相机很远时,公式趋于平缓,几十米的距离在 Z-Buffer 里可能连小数点后五位都没区别
这会造成 Z-Fighting 现象,可以使用 Reversed-Z 方案,将近裁剪面映射到 \(Z_{ndc} = 1\),远裁剪面映射到 \(Z_{ndc} = 0\),配合浮点数的精度分布特性,极大地缓解远处的 Z-Fighting。
话说回来,要得到最终的透视投影矩阵,我们还需再乘一个正交投影矩阵:
至此,我们已经跑通了视图变换的全流程。