Computer Graphics — Transforming
[TOC]
2D Transforming
Scale
对于一个 2D 空间的缩放,我们可以认为所有的横 X 坐标都变为了原来的 \(s_x\) 倍,所有的纵坐标 Y 都变为原来的 \(s_y\) 倍。也就是说我们定义一个缩放函数 \(scale(s_x, s_y, x, y)\),那么有:
Rotate
对于一个二维平面上的点 \(A(x_a, y_a)\),我们将其旋转 \(\phi\) 角度到点 \(B(x_b, y_b)\)。不妨设线段 \(OA\) 与横坐标轴的夹角为 \(\alpha\),长度为 \(r\),于是有:
由此我们可以定义一个旋转函数 \(rotate(x, y, \phi)\),那么有:
Shear
Shear 剪切是一种仿射变换,它将每个点沿固定方向移动,移动量与其到给定直线的有符号距离成正比,该直线平行于该方向。在平面 \(\mathbb{R}^{2}=\mathbb{R} \times \mathbb{R}\) 中,水平剪切(或沿 x 轴的剪切)是一个函数,它将具有坐标 \((x, y)\) 的任意点映射到点 \((x+my, y)\) ;其中 \(m\) 是一个固定参数,称为剪切因子。
故我们可以定义两个剪切函数 \(shear_x(x, y, m), shear_y(x, y, m)\),那么有:
有一点有趣的地方在于,可以通过切变来得到旋转:
这意味着任何二维平面上的旋转都可以等同为三次对应切变。
Reflect
反射变换,或者叫翻转变换,实际上就是 \(-1\) 倍的缩放变换。但是注意只能翻转一个轴,否则的话就等同于旋转了。
Composition and Decomposition
Composition
注意到以上变换都可以使用二维矩阵表示,于是连续的变换就可以通过矩阵乘法表现出来,例如:
需要注意的在于,根据矩阵乘法的定义,变换应该按顺序左乘,也就是按照变换顺序从右往左写变换矩阵。
还有一点就是,矩阵乘法具有结合律,因此我们可以先将所有变换矩阵相乘,得到混合的、总的变换矩阵。
Decomposition
既然变换矩阵是可以组合在一起呢,那么给出一个组合起来的矩阵,我们如何知道进行了哪些变换呢?
假设有线性变换核心矩阵 \(A\):
根据不同的数学原理和应用场景,有以下五种核心的分解方法:
- 直接代数提取法 (Direct TRS Extraction)
这是游戏引擎中最基础、计算性能最高的方法,前提是假设矩阵不包含错切(Shear)。
提取逻辑(列向量标准下):
缩放 (Scale):基向量的模长。
$$ Scale_x = \sqrt{m_{00}^2 + m_{10}^2}, \quad Scale_y = \sqrt{m_{01}^2 + m_{11}^2} $$旋转 (Rotation):归一化基向量后,通过反三角函数求角。
$$ \theta = \text{atan2}(m_{10}, m_{00}) $$
局限性:如果经过非等比缩放后再旋转(产生错切),或者存在镜像(负缩放),直接提取会导致结果错误。
应用场景:常规 Transform 组件的 TRS 参数同步与重构。
- QR 分解 (QR Decomposition)
将矩阵分解为一个正交矩阵 \(Q\) 和一个上三角矩阵 \(R\):
- 几何意义:
- \(Q\)(正交矩阵):代表旋转(可能含镜像)。
- \(R\)(上三角矩阵):代表缩放和错切。
- 操作顺序等价于:先缩放,再错切,最后旋转。
- 应用场景:UI 动画系统(如 CSS3 / SVG Matrix 规范),需要精确剥离并处理错切参数的场景。
- 极分解 (Polar Decomposition)
将矩阵分解为一个正交矩阵 \(U\) 和一个对称半正定矩阵 \(P\):
- 几何意义:
- \(U\)(正交矩阵):代表最近似的纯刚体旋转。
- \(P\)(对称矩阵):代表所有的非刚体形变(拉伸与错切)。
- 应用场景:骨骼动画系统与矩阵插值。剥离出纯旋转进行球面线性插值(Slerp),形变部分进行线性插值(Lerp),能有效防止动画过渡时出现诡异的体积扭曲。
- 奇异值分解 (SVD, Singular Value Decomposition)
最彻底、最具普适性的代数分解方法。任何实矩阵皆可分解:
- 几何意义:
- \(V^T\):第一次局部旋转。
- \(\Sigma\)(对角矩阵):沿着局部坐标轴的非等比缩放。
- \(U\):第二次全局旋转。
- 操作顺序等价于:转到一个特定角度 \(\rightarrow\) 沿 XY 轴正交拉伸 \(\rightarrow\) 再转到一个新角度。
- 应用场景:物理引擎碰撞与形变处理、病态矩阵求逆、高级数学分析。
- 特征分解 / 谱分解 (Eigendecomposition)
将矩阵分解为旋转、对角缩放、逆旋转:
- 先决条件:矩阵 \(A\) 必须是对称矩阵(\(A = A^T\)),即不包含全局旋转。
- 几何意义:
- \(R^T\):将受力方向对齐到局部坐标轴。
- \(S\):在局部空间进行纯对角缩放(特征值即缩放比例)。
- \(R\):旋转回世界空间。
- 本质是局部坐标系下的非等比缩放。
- 应用场景:作为 SVD 和极分解的底层推导(例如对极分解中的形变矩阵 \(P\) 求解具体拉伸轴向),以及碰撞检测中的 OBB(方向包围盒)协方差矩阵分析。
| 分解方法 | 公式 | 提取出的几何分量 | 核心应用领域 |
|---|---|---|---|
| 直接法 (TRS) | 代数公式 | 缩放、旋转 | 游戏对象基础变换,逻辑层 Transform 同步 |
| QR 分解 | \(A = QR\) | 旋转、缩放、错切 | 前端渲染、带错切的 2D UI 变形动画 |
| 极分解 (Polar) | \(A = UP\) | 刚体旋转、拉伸形变 | 骨骼蒙皮、消除扭曲的矩阵平滑插值 |
| SVD | \(A = U\Sigma V^T\) | 旋转1、轴向缩放、旋转2 | 物理引擎形变计算、高鲁棒性底层算法 |
| 特征分解 | \(A = RSR^T\) | 局部轴向缩放 | 仅限对称矩阵,用于解析形变轴向、包围盒生成 |
Translation
Translation 平移是很简单的变换,但也是最特殊的变换,因为它并不是平移变换。我们定义一个平移函数 \(translation(x, y, dx, dy)\),有:
由于并不是线性变换,因此无法使用同纬度的矩阵来表示,这就意味着无法把所有变换合并成一个单一的变换矩阵
吗?
Transformation Matrix
Translation Matrix?
为了解决将所有变换都合并起来的问题,数学家们使用了一个很 tricky 的方法:
引入齐次坐标,通过升维操作,将二维的平移转换成三维的错切 shear,具体来说是,我们将一个二维点坐标 \((x, y)\) 补充一个 \(w\) 分量,升维成使用三维向量 \([x \ y \ w]^T\) 表示。为了方便起见一般设 \(w=1\),并且约定 \(w \neq 0\) 时 \([\frac{x}{w} \ \frac{y}{w} \ 1]^T\) 与 \([x \ y \ w]\) 表示的是同一个点;\(w = 0\) 时我们则认为表示的就是一个向量,而不是一个点,这么做的原因是确保二维向量经过平移变换后仍然是不变的,这一点将在后面证明。
想象一个左下角在原点、两条边紧贴横轴与纵轴的矩形。在二维 Shear 变换中,我们将每个点沿一个固定方向移动,不妨设为纵轴正方向。我们可以得知:紧贴着纵轴的边是不变的,与纵轴平行的边依旧平行且长度不变。这在直觉上相当于:这条边沿着纵轴正方向平移了!
我们可以从坐标变换中更清晰地看出这一点:
对于一条平行于 \(y\) 轴的直线 \(x=c\),其线上的点在 shear 变换后的坐标为 \(\begin{bmatrix} c & kc + y \end{bmatrix}^T\),对于这条线段本身而言,它的 \(x\) 坐标没变,形状没变,只是整体在 \(y\) 轴上增加了 \(kc\) 的距离。在它的 1D 视角里,它确确实实只是做了一次一维平移。
于是,我们将这个思想继续应用到三维 shear,如果我们以 \(z = 0\) 平面为固定底座进行三维 shear,那么在 \(z = w\) 这个截面上,我们看到的就应该是 2D 图形的大小形状不变,且整体进行着平移变换!因此我们可以反推出变换矩阵,我们目前坐标为 \((x, y, w)^T\),期望平移变换到点 \((x+t_x, y+t_y, w)^T\) 上,不难推出该变换矩阵:
只要我们令 \(w = 1\),那么 \(t_x, t_y\) 就直接是对应的偏移量了,这也是前面说的“一般设 \(w=1\)”的原因。此外这还能解释为什么“\(w = 0\) 时我们则认为表示的就是一个向量”,因为此时变换前后的坐标值并没有变化,这正符合向量的平移不变性!
Transformation Matrix!
我们虽然成功将 Translation 变换使用矩阵表示了出来,但是Translation 变换要使用三维矩阵,其他的线性变换却都是二维矩阵,这意味着无法通过矩阵乘法将它们进行结合。
然而若使用分块矩阵的思想,这个问题其实不难解决,我们将 Translation 变换矩阵进行分块可以得到:
按从左上到右下的顺序,以此命名为区域 \(I, II, III, IV\)。区域 \(III, IV\) 我们可以先不管(区域 III \(\begin{bmatrix} 0 & 0 \end{bmatrix}\) 代表了投影分量(Projection)。正是因为它严格为 \(\begin{bmatrix} 0 & 0 \end{bmatrix}\),才保证了变换后的 \(w\) 依然是 \(1\);区域 IV 的 \(1\) 代表全局缩放系数,如果不为 \(1\),整个坐标系会被等比放大或缩小)。区域 \(II\) 表示的是平移偏移量,注意到区域 \(I\) 正好是 Identity Matrix,如果我们只看这一部分,那么其对二维上的点的影响是什么呢?我们将区域 \(I\) 替换成 \(\begin{bmatrix} a & b \\ c & d \end{bmatrix}\),代入矩阵乘法中得到:
不难注意到区域 \(I\) 代表的正是对 \((x, y)\) 进行线性变换!也就是说,我们完全可以将区域 \(I\) 替换成先前的聚合变换矩阵!这样修改后的矩阵的作用相当于先进行线性变换,再进行平移变换,这样问题便解决了,解决的办法就是通过一个矩阵将线性变换和平移结合起来,并且这样得到的矩阵本身是可以再聚合的。
最终我们得到的同时包含了线性映射与平移的矩阵,我们称之为 Affine Transformation Matrix(仿射变换矩阵),而区域 \(I\) 称为线性变换区域,区域 \(II\) 称为平移变换区域,区域 \(III, IV\) 在实际存储中可以省略(恒为 \(\begin{bmatrix} 0 & 0 & 1 \end{bmatrix}\)),使用时再补齐。
3D Transforming
在充分理解了 2D 变换的基础上,3D 变换并不难理解,其实基本相同。
Scale
Rotation
注意到绕 \(y\) 轴旋转似乎有些特殊,其旋转分量拆分出来是 \(\begin{bmatrix} cos\phi & \sin\phi \\ -\sin\phi & \cos\phi \end{bmatrix}\),按另外的都是 \(\begin{bmatrix} cos\phi & -\sin\phi \\ \sin\phi & \cos\phi \end{bmatrix}\),这实际上是旋转对称性带来的错觉。我们将点 \((x, y, z)^T\) 变换后的坐标分别写出来,得到:
可以看出其形式是完全相同的,只是我们在写的时候由于 \(x\) 分量在上,因此要将 \(x\) 项提前,因此破坏了轮转。
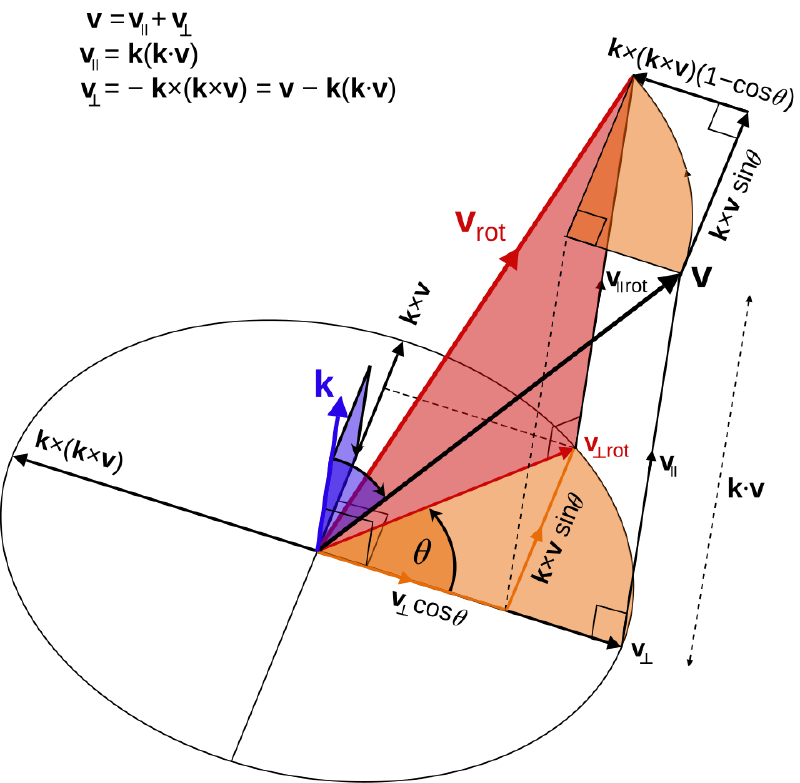
然而现在的旋转只能局限于坐标轴的三个方向,如果我希望绕着任意一个方向向量旋转呢?**罗德里格斯旋转公式(Rodrigues’ Rotation Formula)**将给你答案,下面我们进行该公式的推导。
首先先明确我们的问题,给定空间中任意一个单位向量作为旋转轴 \(\mathbf{u}\),以及一个旋转角度 \(\phi\),要求计算出空间中任意一点(或向量)\(\mathbf{v}\) 绕该轴旋转后的新位置 \(\mathbf{v}'\)。
我们首先将目标向量 \(\mathbf{v}\) 分解为平行于旋转轴 \(\mathbf{u}\) 的分量 \(\mathbf{v}_{\parallel}\) 和 垂直的分量 \(\mathbf{v}_{\perp}\),这是因为平行分量再旋转后是不变的,因此后续只需要讨论垂直分量。平行分量可以通过点乘得到,而垂直分量可以通过作差得到:
表示出来了之后,我们开始考垂直分量 \(\mathbf{v}_{\perp}\) 的旋转,由于其与旋转轴 \(\mathbf{u}\) 相互垂直,那么其旋转实际上就是垂直平面上的二维旋转,为了描述这个垂直平面,我们还需要一个基向量
由于 \(\mathbf{v}_{\perp}\) 和 \(\mathbf{w}\) 就是垂直平面的基向量,且 \(||\mathbf{w}|| = ||\mathbf{u} \times \mathbf{v}_{\perp}|| = ||\mathbf{u}|| \cdot ||\mathbf{v}_{\perp}|| \cdot \sin\frac{\pi}{2} = ||\mathbf{v}_{\perp}||\),因此我们很容易可以得到 \(\mathbf{v}_{\perp}\) 旋转后的向量为:
现在只要再加上平行分量 \(\mathbf{v}_{\parallel}\) 就能得到旋转后的最终向量:
还有别的表示方法,比如令 \(U = \begin{bmatrix} 0 &-u_z &u_y \\ u_z &0 &-u_x \\ -u_y &u_x &0 \end{bmatrix}\),于是有 \(\mathbf {u} \times \mathbf {v} =\mathbf {U} \mathbf {v} ,\quad \mathbf {u} \times (\mathbf {u} \times \mathbf {v} )=\mathbf {U} (\mathbf {U} \mathbf {v} )=\mathbf {U} ^{2}\mathbf {v}\)。将表达式重新推导下:
其中 \(\mathbf{R}\) 就是常用的旋转矩阵:
Shear
三维切变变换实际上在上一节中平移变换推导中提到了,这里只给出沿轴的变换矩阵。
Translation
Extra
现在考虑一个问题,对于一个物体,使其绕着空间中某一条直线旋转特定角度,如何使用 transformation matrix 来表示呢?
我们先前讨论的旋转,一开始都是以某个坐标轴为旋转轴进行的,后来经过拓展我们可以绕过原点的任意轴进行旋转。因此若对于任意的旋转轴,只要我们能够将旋转轴经过原点就好了。顺着这样思路下去,只要我们将旋转轴平移到穿过原点,再对物体进行旋转,在平移变换过程中,需要旋转的物体跟着进行相同的变换来保证相对位置不变,旋转完成后再逆平移变换回去就好了。
因此我们首先设初始旋转轴过空间中一点 \(P_0 = (x_0, y_0, z_0)\),其单位方向向量 \(u = (u_x, u_y, u_z)\),那么我们可以得到每一步的矩阵:
只需要将 \(R\) 修改成齐次坐标形式 \(R_{homo}\),那么我们就可以得到最终的变化矩阵
这样的变换,我们也可以认为是从世界空间变换到了局部旋转空间,进行旋转再变换回世界空间,这正是我们下面要说明的**视图变换(View Transform)**概念的雏形。
Normal Transformation
法线变换是比较特殊的,并且与后面的 Shading 部分关系紧密,因此我们需要专门推导。
假设存在一个表面向量 \(\mathbf{t}\),其法向量为 \(\mathbf{n}\),有 \(\mathbf{n}^T\mathbf{t} = 0\)。在物体经过变换 \(M\) 之后,其表面向量也会进行相应变换 \(\mathbf{t}' = M\mathbf{t}\),但是法向量应该怎么变换呢?我们不妨设其变换为 \(N\),有:
我们的期望是,变化后的法线 \(\mathbf{n}'\) 与变化后的平面向量 \(\mathbf{t}'\) 依然垂直,不难观察得到,如果 \(N = (M^{-1})^T\),那么就可以符合我们的要求:
有一点可以注意的是,如果变换矩阵 \(M\) 只包含旋转(Rotation)和等比缩放(Uniform Scale),那么它本质上是一个正交矩阵(的常数倍)。对于正交矩阵,存在数学性质 \((M^{-1})^T = M\)。这意味着在这种情况下,法线可以直接使用原顶点变换矩阵 \(M\) 进行变换,从而省去求逆矩阵的昂贵计算开销。